기기의 구조와 기능
가. CSU(Continuous Ship Unloader)
나. Stacker/Reclaimer(ST/RE, RE)
저탄 방법
- Cone Shell Stacking
지정된 위치의 중앙부에 하역 지점을 정하여 그 지점부터 적정 높이만큼 적치하고 3~5M 주행 후 다시 적정 높이까지 하역을 반복하는 방법 - Chevron Stacking
지정된 하역 구간을 저속 왕복 운동하며 한 구간씩 탄을 적치하는 방법. 저탄장 자장자리부에서 적정높이까지 탄을 완전 적치 후 Boom을 안쪽 또는 바깥쪽으로 한 구간 선회하여 적정 높이까지 저탄을 반복하는 방법 - Windrow Stacking
지정된 하역 구간을 저속 왕복 운행하며 각 구간을 일정 높이씩 Boom을 선회하며 탄을 적치하여 정해진 저탄 구역을 층층이 단계적으로 탄을 적치하는 방법
무인 자동화 운전
- 운전 모드
- 운전 해석
- Travelling: ST/RE를 Forward, Reverse로 움직이는 운전
- 주행거리: ST/RE가 Forward, Reverse로 움직일 수 있는 최대 거리
- Slow Down Zone: 주행 최대 거리에서 시작점 또는 끝점으로 이동 할 경우 장비 안전을 위하여 이동 속도를 최저 속도로 낮추어 운전되는 구역
- Slewing: ST/RE의 Boom을 좌, 우5)로 움직이는 운전
- 선회각도6): ST/RE Boom이 좌우로 움직이는 각도
- Slow Down Zone: 선회 최대 거리에서 시작점 또는 끝점으로 이동 할 경우와 Boom이 Yard Belt에 접근할 경우 장비 안전을 위하여 Slewing 속도를 최저 속도로 낮추어 운전되는 구역
- Grand BC Anti-Collision: ST/RE의 Boom이 Yard Belt에 접근할 경우 설비의 안전을 위하여 Slewing을 정지 시키는 장치
- Luffing: ST/RE의 Boom을 상, 하7)로 움직이는 운전
- Luffing 각도: Boom이 상, 하로 움직이는 각도
- Grand BC Anti-Collision: ST/RE의 Boom이 Yard Belt에 접근할 경우 설비의 안전을 위하여 Down을 정지 시키는 장치
- Reclaimer 모드 입력 정보
- Pile명
- 탄종명
- Pile 시작 : 상탄 시작 지접을 M단위로 입력(최소 75, 최대 430)
- 단 : 4~1단 입력 가능
- 인칭값 : ㎝단위 입력(최대 130)
- Slew CW/CCW : Slewing 최대의 각 입력(센서 값 무시)
- 1,3,5 PILE : 167(CW) ~ 90(CCW)
- 2,4,6 PILE : 270(CW) ~ 193(CCW)
- 입력 값이 범위에 들지 않으면 Laser Sensor 값 적용
- Reclaimer 모드 상태 및 고장 주요 정보
- Control Power : 클릭 시 Control Power On, Luffing Hyd' Pump On, Rail Clamp On
- Power On 상태에서 5초 동안 Luffing 동작이 없으면 Pump 자동 정지
- Anti : 버튼 조작 시 Boom/Inclined Speed S/W 및 Alignment S/W, Boom Anti Collision S/W 동작 신호를 무시하고 운전 가능
- Wind By-Pass : 풍속 20m/sec 이상으로 기기 정지 시 버튼 클릭하여 운전 가능
- 고장정보 : 자동운전 Interlock과 관련 있는 Fault는 Heavy Fault, 그 외는 Light Fault
- Laser Sensor의 기능
- 좌, 우 L/S : 좌, 우측 Pile 끝을 감지하여 Slew Return 지점 확인(0~30M)
- 정면 하부 L/S : 작업 중인 PILE 거리 측정(0~30M)
- 정면 상부 L/S : 작업 중인 상탄을 측정하여 Pile과의 거리 측정(0~30M), 상단 Pile 존재여부 확인하여 작업 정지 또는 단 이동
- 하부 앞 L/S : 작업 중인 PILE 거리측정 및 지점 확인(0~30M)
- 하부 뒤 L/S : 작업 하단 PILE 거리측정(0~30M)
- 작업 정지 : Bucket Wheel 정지, 수초 후 Boom Belt 정지
- 일시 정지 : Travel, Slew 정지, Boom Belt, Bucket Wheel 기동상태 유지
- Stacking 모드 입력 정보
- PILE 명
- 탄종명
- Pile Start/End POS : 하역 탄종의 시작 지점을 M단위로 표시
- 인칭 값 : ㎝단위 입력(최대 500)
- Pile 높이 : M 단위로 입력(최대 16)
- Stacking 모드 상태 및 고장 주요 정보
- Control Power : 클릭 시 Control Power On, Luffing Hyd' Pump On, Rail Clamp On
- Power On 상태에서 5초 동안 Luffing 동작이 없으면 Pump 자동 정지
- Anti : 버튼 조작 시 Boom/Inclined Speed S/W 및 Alignment S/W, Boom Anti Collision S/W 동작 신호를 무시하고 운전 가능
- Wind By-Pass : 풍속 20m/sec 이상으로 기기 정지 시 버튼 클릭하여 운전 가능
- 고장정보 : 자동운전 Interlock과 관련 있는 Fault는 Heavy Fault, 그 외는 Light Fault
유압계통
- 개요:
작은 시설 규모에 비해 대용량의 힘을 발휘 할 수 있는 효율적 기기- 유압 Pump의 종류 : Gear Type, Vane Type, Plunger(Piston) Type
- Coal, 분진 등 열악한 주위 환경에는 Gear Type이 널리 사용됨
- 유압장치 구성도
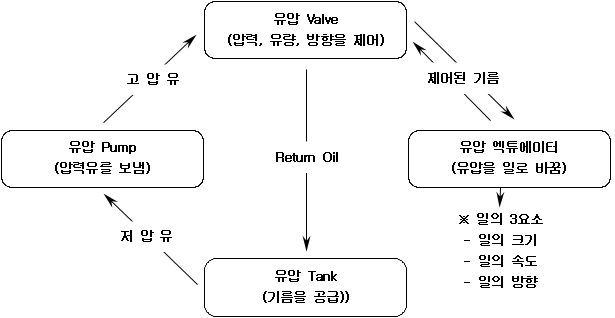
- 유압 Valve(Hydraulic Valve)의 기능
- 압력제어 Valve : 일의 크기를 결정
- 유량조정 Valve : 일의 속도를 결정
- 방향전환 Valve : 일의 방향을 결정
- 유압의 주요장치(5요소)
- Oil Tank - 작동유 보관, 유온상승 방지, 유압 Pump 내 기포 흡입 방지
- Hydraulic Pump - 기계적인 일을 유체 에너지로 변환
- 유압 Valve - 일의 크기, 속도, 방향 제어, Oil을 엑튜에이터로 이송
- Actuator - 유체 에너지를 기계적인 일로 변환
- 유압관 및 부속품 - Filter, 압력계, 어큐뮬레이터, Air Breather, 유면계, 주유구 등 유압 유니트에 필요한 부속품
- 유압 System의 에너지 변화

- 파스칼의 법칙 (외부 힘에 의한 압력)
P(압력-kg/cm2, Bar) = F(힘-N)/A(단면적-cm2))
밀폐된 유체의 면적에 힘을 작용시키면
* 압력은 면에 직각으로 작용한다.
* 각 점의 압력은 모든 방향에 같다
* 밀폐용기 중의 정지유체의 압력은 같다
- 유압 Pump의 분류
- Gear Pump
- Gear Case내에 한쌍의 Gear가 회전하면서 Case 내면과 사이의 액체를 흡입구에서 토출구로 보내는 장치
- 구조가 간단하고 신뢰도가 높고 운전보수가 용이, 가격도 염가여서 널리 보급
- 토출압력 35~175㎏/㎠
- 토출용량 5~300ℓ/Min
- Vane Pump
- Casing 내의 Cam Ring의 중심과 편심된 중심을 가지고 회전하는 로우터에 파놓은 홈안에서 Vane이 활동출입, Cam Ring의 형상에 따라 Vane 및 Cam Ring과 로우터의 3자에 둘러싸인 공간체적이 회전과 함께 변화하여 펌프 작용을 함
- 토출압력 : 일반산업용 1단 70㎏/㎠, 2단 140㎏/㎠ ,고속고압용 1단 105~140㎏/㎠
- 토출량 4~280ℓ/Min
- Plunger Pump
- Cylinder 내에서 Plunger(Piston)의 왕복운동으로 작용하는 용적식 Pump
- 유압용 Plunger Pump는 고속, 고압, 소형화의 목적 때문에 회전 중심축 주위에 다수의 Plunger를 배열하고 Cylinder에 대한 편심에 의하여 Plunger를 왕복운동 시켜 유체를 토출
- 토출유의 맥동이 극히 작으며, 사이클도 높고 진동도 작아 원활한 운전 가능
- 토출압력 100~300㎏/㎠
- 토출량 10~500ℓ/Min
- 토출효율 80~90%


다. Belt Scale
- 계량 설비 3요소 : Belt 속도, Lead Cell, 제어기
- 탄량(Q) = 무게(㎏/㎠) × Belt 속도(m/s)
라. Magnetic Separator
마. Belt Weighing Feeder
- 개요 : 2종의 석탄을 최대 10:90% 비율로 혼합하여 상탄하는 설비
- 구성요소
- Weigh Frame : Idler와 로드 센서로 Belt와 이송물질의 하중을 전달하는 기계적 조합
- Weighing Leg : Weigh Frame에서 하중 측정이 이루어지는 부분
- Lead Cell : 하중을 측정
- Speed Sensor : Belt의 이송속도를 전자적 신호로 변환하는 장치(길이 측정 장치)
- Weight Quality Idler : Fixed Idler와 Weigh Idler로 구성
- BWF Controller : Belt 속도의 Control에 의하여 Feeder의 이송 유량을 유지시켜주는 장치